| |||||||||||||

| Заходите к нам на форум: задавайте вопросы - получайте ответы! |
|
Исследование Солнечной Системы - Марс
| |||||
 Исследователи Исследователи |
|||||
Марсоход Curiosity |
Страница:
Начало миссии Curiosity (Part #1, Part #2),
Посадка на Марс (Part #1, Part #2, Part #3, Part #4, Part #5),
Curiosity на Марсе (Part #1, Part #2, Part #3, Part #4, Part #5),
Грунт на Марсе (Part #1, Part #2),
Маршрут (Part #1, Part #2, Part #3),
Органика на Марсе,
1000 дней на Марсе (Part #1, Part #2, Part #3),
Галерея миссии Curiosity;
|
|
Марс - красная звезда
Марсоход "Curiosity" Перелет и посадка на Марс
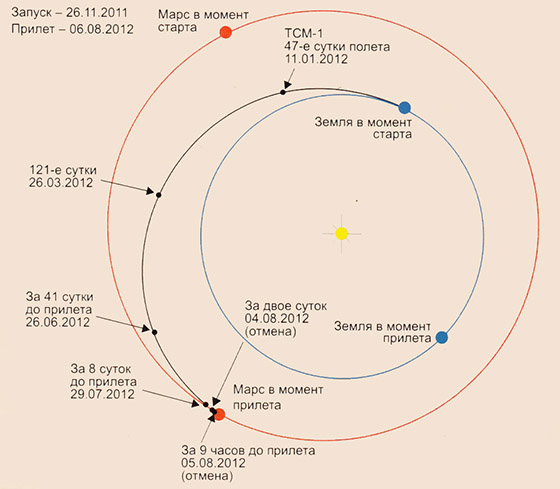
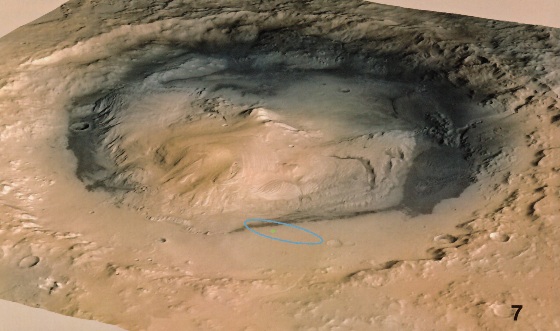
6 августа 2012 г., преодолев за 254 дня полета около 567 млн км, американский межпланетный комплекс MSL достиг Марса, вошел в атмосферу планеты и в 05:31:45 UTC (здесь и далее дается время прихода радиосигнала на Землю, если специально не оговорено иначе) успешно выполнил задачу по доставке на ее поверхность тяжелой мобильной лаборатории - марсохода Curiosity («Любопытство»). В марсианском кратере Гейл начаты исследования, цель которых - определить пригодность этого района для существования жизни в прошлом и в настоящем. Земля - Марс
Американский марсианский комплекс MSL был запущен 26 ноября 2011 г. и выведен на гелиоцентрическую орбиту в соответствии с планом. По словам главного специалиста по планированию полета и навигации Луиса Д'Амарио (Louis D'Amario), выведение было «одним из самых точных в истории межпланетных миссий». Расчетную траекторию MSL выбрали так, чтобы гарантировать непопадание в Марс нестерилизованной верхней ступени носителя: было предусмотрено боковое отклонение в 56400 км. Фактически по данным траекторных измерений получилось чуть больше - 61200 км.
Через три дня после старта, 29 ноября, произошел перезапуск управляющего компьютера RCE, который является частью марсохода Curiosity и управляет полетом комплекса в целом. Причиной был сбой в программном обеспечении, отвечающем за опознание светил в поле зрения звездного датчика системы ориентации. Аппарат перешел в защитный режим, из которого вскоре был выведен командами с наземных станций, только вместо звездных датчиков пришлось временно задействовать инерциальное измерительное устройство RIMU. В тот же день серией включений бортовых ЖРД скорость вращения КА была снижена с 2.5 до 2.05 об/мин. Телеметрия, поступающая со скоростью 25 кбит/с, засвидетельствовала, что солнечные батареи дают необходимые 800 Вт. Каталитические подложки двигателей оказались теплее, чем нужно, но от этого избавились изменением режима работы нагревателей. В остальном тестирование служебных систем на отлетной траектории прошло успешно. Сбой звездных датчиков заставил перенести первую коррекцию траектории, которая планировалась на 15-е сутки полета. Однако с этим можно было не спешить - точное выведение позволяло безболезненно отложить ее на месяц. 6 декабря был включен первый научный прибор марсохода - радиационный детектор RAD, который приступил к измерению уровней космического излучения солнечного и галактического происхождения, а также характеристик вторичных частиц, выбитых из элементов конструкции самого ровера, посадочной системы и теплозащитного экрана. Прибор вел измерения в течение семи месяцев и был выключен 13 июля. За это время он зафиксировал излучение пяти солнечных вспышек, первая из которых «накрыла» MSL еще 23 января 2012, а за ней последовали события 27 января, 7 и 13 марта и 17 мая. Самая сильная вспышка 7 марта дошла до MSL к вечеру 8-го и дала поток порядка 40 протонов за секунду на 1 см2, но она не повлияла на работу систем КА, в том числе и радиационно-стойкого процессора типа RAD 750 (разработчики гарантировали, что отказ RAD 750 из-за внешнего облучения может случиться один раз в 15 лет). Суммарное воздействие галактических космических лучей оказалось даже выше, чем от солнечных вспышек. Суточная накопленная доза достигала 0.3 бэр, а суммарная составила «значительную часть» от допускаемой NASA дозы облучения астронавта за всю жизнь - 100 бэр. Следует отметить, что конструкция MSL обеспечивала хорошее экранирование, снижая внешнее облучение по крайней мере в несколько раз. Данные с межпланетной траектории и с поверхности планеты послужат основой при планировании средств защиты от радиации для пилотируемой экспедиции к Марсу, если таковая будет организована. 21 декабря был проведен «калибровочный» маневр для проверки блока RIMU, определяющего текущую ориентацию КА и его ускорение при работе двигателей. Это позволило провести 11 января 2012 г. коррекцию траектории ТСМ-1. Стоит сказать, что всего на трассе было запланировано шесть коррекций. Две первые, через 15 и 120 суток после старта, должны были устранить преднамеренное отклонение траектории выведения от Марса. Третья, за 60 суток до прибытия, служила для точного прицеливания в заданный район планеты, а следующие три - за восемь суток, двое суток и девять часов - для удержания КА на заданной траектории. Перелетная ступень была оснащена маломощными двигателями (две группы по четыре ЖРД MR-111C тягой по 0.45 кгс), поэтому включение было продолжительным, а так как комплекс стабилизировался вращением, работать приходилось короткими импульсами. Маневр начался 11 января в 23:00 UTC и занял в общей сложности 175 минут. Сначала два хвостовых двигателя были включены на разгон на 19 минут, чтобы выдать ту составляющую приращения скорости, которая была сонаправлена с осью вращения. Затем боковые двигатели каждой группы включались попеременно на 5 секунд на каждом обороте, чтобы отработать боковую составляющую, и так более 200 раз. Суммарное время их работы было близко к 40 минутам, а общая продолжительность с учетом пауз - почти два часа. Контроль работы ЖРД осуществляли бортовые измерительные средства. Данные допплеровского контроля скорости и телеметрия с КА показали, что маневр прошел успешно. Заданное приращение в 5.5 м/с было выдано, точка прицеливания сместилась примерно на 40000 км к Марсу, а время подлета - на 14 часов назад, чтобы обеспечить возможность посадки в кратере Гейл. Остаточные ошибки траектории составили примерно 5000 км по координатам и 20 мин по времени. 15 января началась недельная серия более глубоких технических проверок состояния систем, в том числе и тех, которые отвечают за посадку на Марс и за связь ровера со спутниками Марса. Одновременно специалисты продолжали разбираться с происшествием 29 ноября. На двух экземплярах бортового компьютера, оставшихся на Земле, прогнали несколько тысяч тестов, и на одной машине получили несколько сбоев, а на второй - ни одного. Пришлось задействовать второй (резервный) по-лукомплект на борту: в то время как канал А управлял системами КА, на канале В тестировали ПО звездного датчика. В ходе этих тестов 26 января последний впервые увидел и опознал планету Марс. Причина сбоя была найдена совместными усилиями разработчика и специалистов JPL: это оказалась неизвестная доселе ошибка в программировании регистров кэш-памяти процессора, способная привести в специфических условиях полета MSL к ошибке доступа к ним. Была разработана модифицированная конфигурация регистров, выполнены тысячи новых тестов; новый безошибочный вариант ПО заложили на борт и к 9 февраля убедились, что изменения вступили в силу. С этого момента звездный датчик вновь отвечал за определение текущей ориентации MSL.
По мере удаления от Земли падала мощность солнечной батареи КА и скорость радиообмена. К 9 февраля аппарат получал 704 Вт питания, передавал телеметрию со скоростью 800 бит/с и принимал команды на 1 кбит/с. Скорость вращения составляла 1.97 об/мин. Второй маневр, проведенный 26 марта, придал аппарату всемеро меньшее приращение скорости, чем первый - 0.78 м/с. Продольная составляющая была выдана трехминутным включением двух осевых двигателей, для поперечной потребовалось более 30 пар пятисекундных импульсов боковыми соплами. Маневр также прошел успешно и приблизил траекторию КА к расчетной. В марте операторы на Земле протестировали и нашли исправными девять приборов Curiosity, предназначенных для работы на поверхности Марса. В частности, 16 марта был включен детектор ДАН-ДЭ российского прибора ДАН, который проработал без замечаний в течение часа и был выключен по команде. Телеметрия и результаты измерений тепловых и эпитепловых нейтронов, принятые средствами американской системы дальней связи DSN, поступили в ИКИ РАН на обработку и подтвердили штатную работу инструмента. Метеодатчик марсохода честно показал нулевое атмосферное давление, а камеры - черный фон. Впрочем, 20 апреля камера MAHU сделала тестовый цветной снимок окружающего ее пространства, подсвечивая его собственными светодиодами. На Земле, в JPL, 16-22 апреля прошел тест готовности к посадке и начальным операциям на поверхности Марса. На технический макет ровера с компьютером и программным обеспечением, идентичным летному, выдавались те же команды, которые предстояло исполнять Curiosity. Марсоход-аналог перемещался, делал снимки и собирал образцы, как и было предписано заданием. Второй подобный тест, посвященный отработке входа в атмосферу и посадки, проводился тремя месяцами позже и завершился 12 июля. В первых числах июня на борт Curiosity заложили обновленное ПО, а 11 июня было объявлено о сокращении расчетного эллипса рассеяния, то есть о повышении точности предстоящей посадки. Задолго до запуска было решено, что Curiosity должен быть доставлен в кратер Гейл и сесть невдалеке от обширной возвышенности, известной под условным именем гора Шарпа. Изначально район посадки имел форму эллипса длиной 25 км и шириной 20 км, однако анализ возможностей новой посадочной системы с учетом точности прогноза атмосферных условий позволил сократить его до 20x7 км и сместить расчетную точку посадки на 7 км ближе к горе. В результате путь ровера до основного района запланированных исследований на склоне Шарпа стал короче почти вдвое, а в единицах времени - примерно на четыре месяца.
В июне же стало известно, что проведенные в JPL эксперименты показали возможность загрязнения марсианских образцов тефлоном и дисульфидом молибдена из состава бурильного устройства. Как заявил научный руководитель проекта Джон Гротцингер (John Grotzinger), примесь тефлона может затруднить анализ образцов на содержание углерода, но не сделает его невозможным. Первые 209 суток пути считались фазой перелета, а последние 45 дней - начиная с 23 июня - фазой подлета. Первая из четырех подлетных коррекций MSL состоялась 26 июня. Целью маневра ТСМ-3 было направить КА к расчетной точке входа в атмосферу с учетом решения об изменении места посадки. Для приращения скорости всего в 0.05 м/с потребовалось четыре включения двигателей общей продолжительностью 40 сек. Сдвиг точки входа составил 200 км, а времени входа - 70 сек. 11 июля аппарат в 20-й раз подкорректировал свою ориентацию так, чтобы антенна среднего усиления MGA была как можно точнее направлена в сторону Земли. Следующий подобный разворот состоялся 17 июля; информация о предыдущих и о следующих в сводки не попала. 16 июля провели преднамеренный «холодный» перезапуск канала В бортового компьютера. Убедившись в его стабильной работе, 17 июля операторы сделали резервный канал В основным, 18 июля выполнили перезапуск RCE-A и 19 июля вернули ему статус основного, сделав RCE-B резервным. Целью операции было привести оба канала в известное начальное состояние, освободив от всех «напластований» полугодовой работы. Кроме того, в период с 17 по 19 июля в оба полукомплекта были загружены уточненные программы работы и параметры связи для этапа входа в атмосферу, посадки и начала работы на поверхности. 20 июля настроили «аварийное» программное обеспечение. В случае перезагрузки по любой причине основного компьютера в критические семь минут торможения в атмосфере и посадки оно должно было немедленно передать управление резервному каналу и завершить посадочные операции с использованием сокращенного набора правил и инструкций. 23 июля были приведены в рабочее состояние два инерциальных измерительных устройства посадочной ступени, предназначенные для определения ее скорости и ориентации на финальном участке спуска на реактивной тяге, и заложены соответствующие параметры для навигации, управления и связи. Двумя днями позже протестировали радиолокатор посадочной ступени. 24 июля две литий-ионные аккумуляторные батареи Curiosity, поддерживавшиеся на 70-процентном уровне заряда во время перелета, были дозаряжены от солнечных батарей перелетной ступени до 100% емкости, то есть до 42 А-ч каждая. Тем самым систему электропитания ровера подготовили к пиковым нагрузкам, превышающим выход радиоизотопного генератора. 29 июля в 05:00 UTC прошла вторая подлетная коррекция траектории - ТСМ-4. Целью ее было сместить точку входа в атмосферу на 21 км к западу и тем самым вернуться на номинальную траекторию. Для изменения скорости на 0.01 м/с было достаточно двух коротких включений двигателей общей продолжительностью около шести секунд. Как и в трех предыдущих случаях, маневр прошел успешно и оказался настолько точным, что две оставшиеся коррекции - за двое суток и за девять часов до прибытия - последовательно были отменены.
30 июля операторы разрешили работу пиротехнических устройств и проверили правильную загрузку ПО для управления посадочными двигателями. После этого на борту была активирована посадочная циклограмма, и от Земли требовались лишь небольшие «подстройки». Данные для них поступали от баллистиков, отслеживающих реальную траекторию полета КА, и от специалистов, обрабатывающих информацию спутника MRO о фактическом состоянии атмосферы Марса. 4 августа внесли последние уточнения в навигационные данные, обеспечивающие управляемый спуск в заданный район поверхности планеты. В тот же день на борту начался подогрев восьми посадочных двигателей. 3 августа в 19:35 UTC до Марса оставалось всего 753 200 км. 4 августа в 21:25 была пройдена отметка 420000 км, а 6 августа в 01:18 MSL находился всего в 57 900 км от планеты. Подлетная скорость КА увеличилась с 3.6 до 3.75 км/с и продолжала быстро расти, чтобы к моменту входа в атмосферу достичь 5.84 км/с. Последняя баллистическая оценка показала: вход в атмосферу на высоте 125 км над средним радиусом Марса, то есть на расстоянии 3522.2 км от центра планеты, состоится в 05:10:46 по бортовому времени КА, что соответствовало 05:24:34 UTC по времени прихода сигнала. Отклонение ожидаемой точки входа от расчетной было микроскопическим - всего 0.25 км! Семь минут триумфа
6 августа в 04:05 станция DSN в Канберре выключила свой передатчик - Земля обратилась в слух. Сигнал ловили сразу три приемника: один с 70-метровой антенной и два с 34-метровыми. На подстраховке работал 64-метровый радиотелескоп Паркс. За посадкой Curiosity следили не только специалисты: NASA организовало прямой репортаж из Лаборатории реактивного движения, который не только шел по собственному телеканалу агентства, но и транслировался на уличный экран на Таймс-сквер в Нью-Йорке.
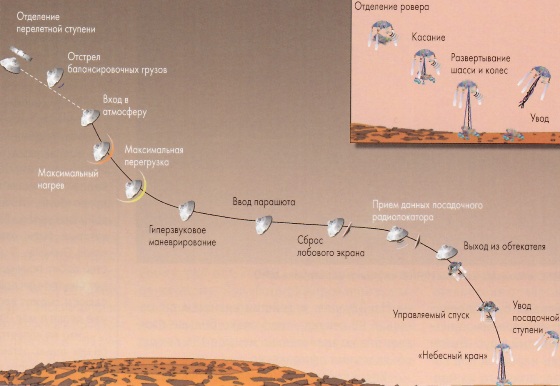
Борт выполнял заложенную программу. Ровно за 10 мин до входа в атмосферу три пироножа перекусили коммуникации, а шесть пирозарядов отделили десантный комплекс от перелетной ступени. Это произошло в 05:01 UTC, но так как радиосигнал от Марса в этот день шел 13 мин 48 сек, подтверждение разделения поступило в 05:15. Телемефия прекратилась; остался лишь контрольный тоновый сигнал со 100-ваттного передатчика посадочной ступени, в изменениях частоты которого зашифровывались последующие события. Всего для всех этапов посадки было предусмофено 256 вариантов сигнала. MSL шел с запада на восток над самым краем планеты, так что последние две минуты спуска и сам момент посадки уже нельзя было видеть с Земли. Поэтому все три работающих спутника Марса заранее изменили свои орбиты так, чтобы наблюдать посадку. Mars Odyssey должен был ретранслировать ход спуска в реальном масштабе времени, a MRO и Mars Express - записывать информацию для последующего воспроизведения. С помощью двигателей ориентации MR-10711, работающих сквозь проемы в хвостовом обтекателе, десантный комплекс остановил вращение, развернулся теплозащитным экраном вперед и сместил ценр тяжести путем отстрела двух балансировочных вольфрамовых грузов массой по 75 кг.
Расстояние от точки входа над долиной Лик (3.9° ю. ш. 126.7° в.д.) до расчетной точки посадки (4.6°ю.ш„ 137.4° в.д.) составляло 634 км. Впервые в истории планетных исследований предстоял управляемый спуск с аэродинамическим качеством и регулированием дальности за счет S-образных маневров. Исходные данные для управления предстояло получать с гироскопического инерциального измерительного устройства ровера RIMU. Вход в атмосферу был подтвержден через восемь секунд после расчетного момента ТЕ. Максимальный нагрев (2100°С) ожидался через 80 сек после входа, максимальное тормозное ускорение на уровне 12g - десятью секундами позже. Аппаратура MEDLI, установленная на теплозащитном экране, регистрировала тепловые нагрузки и скоростной напор, записывая данные в бортовой компьютер марсохода. Комплекс успешно прошел этот этап - и через две с половиной минуты после ТЕ через «Одиссей» начала поступать телеметрия. Высота оказалась чуть ниже 19 км, скорость - 845 м/с. Через 259 секунд после входа десантный комплекс снизился до 11 км и затормозился до 405 м/с. Отстрелились шесть балансировочных грузов массой по 25 кг, возвращая центровку к симметричной. На сверхзвуковой скорости М=1.7 была введена в действие парашютная система с главным куполом диаметром 15.7 м и 80 стопами. Двигатели ориентации продолжали работать, гася неблагоприятную динамику объекта. 19 секундами позже отделился лобовой теплозащитный экран, заработал посадочный радиолокатор и началась видеосъемка камерой MARDI.
Примерно через 373 секунды после входа включились восемь ЖРД регулируемой тяги MR-80B, пока всего лишь на 1% от номинала. Сразу после этого сработал очередной комплект пирозарядов, и посадочная ступень с марсоходом «выпала» из хвостового обтекателя. Еще через секунду двигатели набрали тягу, и начался управляемый спуск - увод от обтекателя, переход в вертикальное снижение со скоростью 20 м/с, дотормаживание на 80% тяги до 0.75 м/с на высотах от 55 м до 21 м - и спуск на постоянной скорости на четырех работающих двигателях из восьми. Пока все шло по привычной схеме: известно, что в разреженной атмосфере Марса парашют не обеспечивает посадки с безопасной скоростью, и в конце приходится тормозить двигателями. Уникальность проекта MSL заключалась в том, что и этот этап не был последним: для спуска ровера на поверхность впервые был создан необычный «небесный кран» (Sky Crane). Он считался главным риском всего проекта, но у разработчиков не было выхода. Надувные амортизаторы, использованные с предыдущими марсоходами MER, не могли смягчить падение столь тяжелого аппарата; чисто реактивная посадка создала бы слишком сильные ударные нагрузки, которые потребовали бы дополнительного упрочнения и утяжеления конструкции... В общем, замкнутый круг. Выйти из него удалось, подвесив марсоход под посадочной ступенью и рассчитав его на максимальную вертикальную скорость 1.25 м/с.
На высоте 19 м прошел подрыв пироболтов - и ровер пошел вниз на трех нейлоновых тросах, по пути расчековывая и переводя в рабочее состояние подвеску и колеса. Все это время он оставался соединенным со ступенью гибким силовым и информационным кабелем. Семь секунд - и Curiosity завис в 7.5 метрах ниже посадочной ступени, продолжающей плавное снижение со скоростью 0.75 м/с. До поверхности оставалось 4-5 метров... но напряженная тишина в зале управления длилась еще секунд тридцать. Причина задержки была в том, что автор «небесного крана» Адам Стелцнер сначала должен был получить три технических доклада: о снижении тяги двигателей посадочной ступени, об отсутствии движения ровера и о наличии непрерывного сигнала с поверхности в УКВ-диапазоне в течение 10 секунд. Поэтому лишь в 05:32:18 в зале раздалось: «Touchdown confirmed!», что означало «Есть касание!»
Фактическая последовательность событий во время посадки Curiosity стала известна 9 августа. По горячим следам оператор назвал момент касания 05:14:39 UTC, что было явной ошибкой. Кроме того, не соответствует расчетному приведенный здесь интервал между отделением лобовой теплозащиты и выходом посадочной ступени из хвостового обтекателя. По данным Джонатана МакДауэлла, в действительности он составил 95 секунд - несколько больше ожидаемого, но значительно меньше 134 секунд, объявленных официально. Когда ровер прочно встал на грунт, посадочная ступень автоматически снизила тягу и еще секунду «думала» - проверяла стабильность сигнала о снижении нагрузки. Затем она перешла в зависание, три троса и кабель были перерезаны пироножами*, а ступень включила двигатели на полную тягу на четыре секунды и ушла вверх и назад от места посадки**.
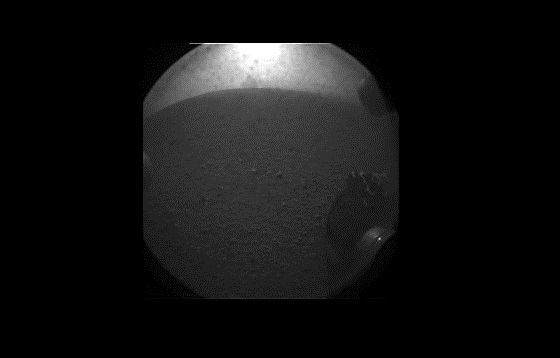
В зале управления в Пасадене еще не смолкли ликующие крики, а в 05:34 на экране появился первый снимок, сделанный хвостовой камерой HazCam. Правда, очень маленький, всего 64x64 элемента, но он был сделан через 41 секунду после касания и пришел через две минуты! Через пару минут пришла аналогичная картинка с передней камеры, а еще чуть позже с борта «скачали» эти же фотографии в большем размере - 256x256. Вид Солнца в небе, колеса на грунте и тени от марсохода убеждал, конечно, лучше, чем телеметрия: уникальная посадка прошла успешно!
До 6 августа сложнейшая последовательность посадки MSL была известна не иначе, как «семь минут ужаса» - так даже назвали документальный фильм, сделанный по заказу NASA. Это был очень понятный пиаровский ход: если миссия потерпит неудачу, агентство заявит, что не скрывало сложности и опасности проекта. «Мы сделали все, что только могли предвидеть, чтобы добиться успеха, - говорил менеджер проекта MSL Питер Тайсингер (Peter Theisinger). - Мы ожидаем безопасной посадки Curiosity, но гарантии нет: риски реальны». Как теперь все изменилось! «Семь минут ужаса превратились в семь минут триумфа, - отметил заместитель администратора NASA по космической науке, бывший астронавт Джон Грунсфелд. - С моей необыкновенной радостью в связи с этим успехом может сравниться лишь всепоглощающая гордость за мужчин и женщин из команды MSL». Его босс, администратор Чарлз Болден, высказался не менее торжественно: «Сегодня колеса Curiosity начинают прокладывать путь к человеческим следам на Марсе... Президент Обама поставил смелую цель отправки людей на Марс в середине 2030-х годов, и сегодняшняя посадка отмечает важный шаг к достижению этой цели». Наконец, сам Барак Обама отреагировал на посадку Curiosity: «Сегодня на планете Марс Соединенные Штаты Америки писали историю... Поздравляю всех мужчин и женщин NASA, которые сделали это замечательное достижение реальностью, и с нетерпением жду открытий Curiosity». И ничего, что в бюджете NASA нет денег на следующие большие марсианские проекты и что перспективы пилотируемых полетов во Внеземелье столь же неясны в 2012-м, как и три или восемь лет назад. В этот день, б августа, Америка могла гордиться очередной победой! Автор материала: И. ЛИСОВ,
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||





|
|